Air Robot
This is the project that ate a million dollars of my own money. This was back a while
when a million dollars was a lot of money. Like most things that lose a lot of money
this project was me "following my dream." In this case that dream was trying to crack AI. The thinking
was that to invent ways to make machines think like a human they needed to be employed
in human tasks. The most capital "H" "Human" tasks out there were physical, and so the idea was that,
by building machines to solve difficult physical tasks, that only humans were doing,
we would inch closer to cracking the essence of human intelligence.
This idea came to me when I was driving past some strawberry fields
and saw people bent over picking strawberries. It looked like such labor intensive and
generally awful work that I thought "wouldn't it be nice to automate that." I wasn't
thinking of the big picture and that all those people would lose their jobs. I was
just thinking "there's a hard problem to solve" and flush with cash from a
recent sale of a company I started, I was off to the races.
I hired a few engineers with a craigslist ad titled "hard work, low pay, big challenge."
That was an amazing ad I would use many times in the future. A couple of awesome engineers
signed on and we set about trying to come
up with something. This started in the middle of La La Land in an office building that mostly
had Hollywood companies in it. So among production, casting, talent agencies and the like we
went on a quest to develop... something. I believe it was strangely similar to developing a movie/TV show,
or at least what I have read about that process.
What came out of this process was the uncreatively named "Air Robot" project, which was to be the main
product of the aptly named "Service Machines Inc." company. The idea was
that the main problem was that robotics were so expensive, that the costs were hindering development.
Sure, there were cheap toy market stuff to play with robotics, but to do actual work these devices
weren't strong enough to cut it. The next step up was industrial robotics and that stuff was super expensive.
To disrupt this, we came up with a plan to drive the delivered cost per axis of motion from
$10,000 to $100. The idea being that driving this cost down would foster a new era of development
akin to the adoption of the Personal Computer.
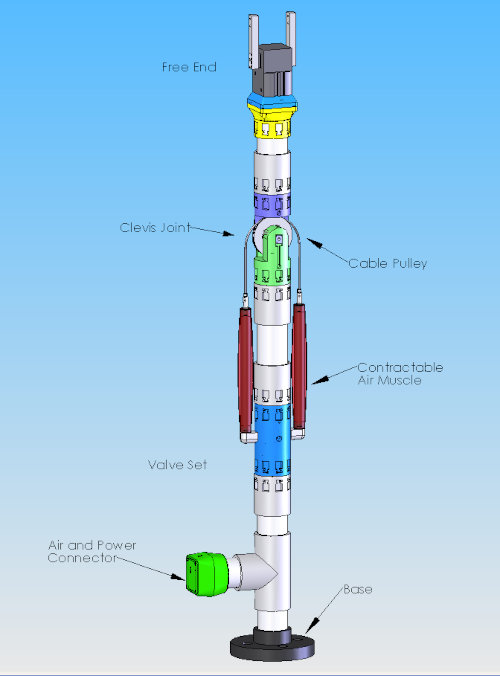
The solution was to make a robotic system that used PVC pipe that could be glued together to
fit any solution. At the heart of this was the McKibben muscle actuator. It is basically a hotdog
shaped rubber bladder that, when inflated, pulls lengthwise with lots of force. To accommodate this actuator,
and it's incredible pulling strength per weight (and cost) we needed to be able to finely adjust
the pressure inside the bladder. The design and fabrication of parts to make this system happen
lead to me embarking on a journey that included equipping, to the tune of $400,000, a machine and
prototype shop. Oh yeah, we also had around 12 degreed mechanical, electrical, and software engineers.
The shop had a full on industrial grade Haas VF-2 Milling Center, Haas SL-20 Turning Center,
a fully stocked electronics bench, a big nearly silent (end equally expensive) air compressor,
and even a small injection molder. All this was so we could make parts that could withstand
forces near the tensile strength of the material. At the time 3D printing was just finding its own and parts made
with this process were either not very precise and/or not very strong and so were mainly for show.
We needed parts made with their engineered strength and so I invested in this high end manufacturing
equipment.
 Haas VF-2 Milling Center
Haas VF-2 Milling Center
 Haas SL-20 Turning Center (Lathe)
Haas SL-20 Turning Center (Lathe)
My Role
My role was as the owner of the company, Service Machines Inc.,
leading the team in this development. I supervised the team that ranged from 2 to 12 engineers working on the
project. I also did a lot of hands-on work on the project.
Air Robot
The systems were composed of modular components with PVC fittings which that could be assembled into
custom implementations the same way you assemble a PVC lawn chair. The following components were designed and actually built. It's a shame, but I
don't have a single photo of these parts. For all the parts you see below production quality prototypes were built on the milling machines
and/or in the injection molder. In addition to making the mechanical components of each part, circuit
boards were also made and fitted into the parts.
 Arm assembly made from multiple components
Arm assembly made from multiple components
Electronics
The electronics included circuit boards on each module. The Multiconnector had connectors for USB that
enabled communication to a PC. It was also the master of an I2C bus that connected all the other components.
Each joint had variable resistors attached to determine the relative location of the joint after calibration.
The Valve Set board was made of two boards and included four pressure sensors, the calibration of
which was a complicated arrangement of electronic components that required advanced electrical theory to
determine.
The system was designed to be low cost all the way. It was built around the ATMega chip and was designed
to be powerful but also cost less than $20 per board.
The boards firmware in included an algorithm to self-discover all the components connected to the bus.
It also included positioning algorithm and learning algorithms to make slight adjustments to positioning
to compensate for mechanical fatigue of the muscle and wire components.
Challenges
The project suffered from a basic deficiency in the muscle component. Just like our own human muscles
the McKibben muscles suffer from fatigue as they are used. Unlike human muscles they don't have elaborate
organic cellular processes to self-repair when they are not in use. We did an amazing amount of research to
try and extend the life of the muscle. For six months our test rig was constantly lifting and releasing
near the maximum weight of the pull strength of the muscle (around 80 pounds). Every day you could hear
it lift and fall every 3 seconds as air pressure entered and exited the muscle. Our original designs lasted
around 300 pulls. We then tried using a double bladder, then double bladder with lubrication in between,
even a triple bladder. It seems like we tried everything we could think of including introducing various soft cloths,
silicone coatings, all kinds of stuff. Eventually we were able to get 6000 pulls before breaking. That was a big
increase but in an industrial robotics situation we were still talking a few days before breakdown. By contrast
most industrial robotics can move very fast all day, every day for around a year before they even need to be
lubricated.
The upshot of this challenge was the product was not likely useful as an industrial robot. This left the product
in the realm of the hobbyist/toy market. This was doable but was not going to generate the sales
I was hoping for, and, since I knew little about the toy market, I decided to shelve the whole project.
It's still a good idea. It has promise. While I was the right person to get this built, with the big challenges
and relatively low budget we had to work with, I was not the right person to bring this product to market. If I make
a big bundle of cash in the future, who knows.